Mécanique du point – Les lois de Newton
1. Relation Fondamentale de la Dynamique
La dynamique a pour objet de prédire le mouvement de corps dans un environnement donné. Chaque théorie en mécanique est basée sur un postulat ou sur une loi d’évolution.
En mécanique Newtonienne, elle peut s’énoncer de la façon suivante :
Pour tout système, il existe au moins un référentiel R, dit référentiel galiléen, dans lequel le mouvement d’une particule de masse m et de vitesse ![]() peut être décrit par la loi :
peut être décrit par la loi :

![]() est la force exercée sur le système et
est la force exercée sur le système et ![]() la quantité de mouvement.
la quantité de mouvement.
Cette relation fondamentale de la dynamique (RFD) est invariante par changement de référentiel galiléen.
La quantité de mouvement
En mécanique classique (non relativiste et non quantique), on appelle quantité de mouvement d’une particule de masse m se déplaçant à la vitesse ? la grandeur vectorielle :

La quantité de mouvement a les dimensions M⋅L⋅T−1 et son unité s’exprime en kg⋅m⋅s-1.

La force s’exprime en Newton (N ≡ M⋅L⋅T−2) ou kg⋅m⋅s-2.
Ainsi, on peut également proposer une autre formulation de cette loi à partir de la définition de la quantité de mouvement :
où le vecteur ![]() est l’accélération de la particule (en m⋅s-2).
est l’accélération de la particule (en m⋅s-2).
Remarques
- La RFD n’est pas une simple définition de la force. Elle exprime une loi de la nature : l’accélération d’une particule peut être reliée aux interactions quelle subit.

En d’autres termes, elle relie la cinématique (l’espace – temps) à la dynamique (les interactions).
Cette loi nous « dit » que le mouvement d’une particule peut être prédit en résolvant une équation différentielle du second ordre dépendant du temps.
La solution du problème est unique (mécanique déterministe) si les conditions initiales de position et de vitesse sont déterminées simultanément (principe de Poincaré).
- La relativité restreinte admet ce principe et la RFD, bien que la quantité de mouvement prenne la forme :
avec :
![]() étant la vitesse de la lumière dans le vide.
étant la vitesse de la lumière dans le vide.
Dans le cas des faibles vitesses : ![]()
On retrouve la formulation classique de la quantité de mouvement.
- La mécanique quantique n’admet pas le principe de Poincaré (déterministe) et l’équation d’évolution d’un système est décrite à l’aide des potentiels introduits plus loin dans le cours pour d’autres usages.
2. Principe d’inertie
Un système isolé est un système qui n’est soumis à aucune force externe.

La quantité de mouvement totale par rapport à un référentiel galiléen d’un système isolé est constante.
Recherche d’un référentiel galiléen
Un référentiel galiléen étant défini comme un référentiel où s’applique la RFD, il suffit pour tester le caractère galiléen d’un référentiel d’y réaliser des expériences et de comparer les résultats aux prévisions déduites de la RFD.
On peut se servir également du « principe d’inertie » pour définir le caractère galiléen d’un référentiel. D’après ce principe, on peut énoncer la définition suivante :
Un référentiel galiléen est un référentiel dans lequel un système isolé a un mouvement rectiligne uniforme ou nul.
Toutefois, on ne peut pas toujours tester expérimentalement cette condition (cas des particules élémentaires par exemple).
3. Principe de l’Action et de la Réaction
Considérons un système de deux particules m1 et m2 en interaction.
Le système (m1 + m2) est isolé.
m1 applique une force ![]() sur m2 et m2 applique une force
sur m2 et m2 applique une force ![]() sur m1.
sur m1.
L’application de la RFD successivement à m1 et m2 donne :
Pour un système isolé :

Ou encore :

Quand deux particules sont en interaction, la force qui s’exerce sur l’une des particules est d’intensité égale et de sens opposé à la force qui s’exerce sur l’autre particule.
Remarque
Le problème étant invariant par rotation autour de l’axe joignant les centres des deux particules, les deux forces doivent être alignées le long de cet axe.
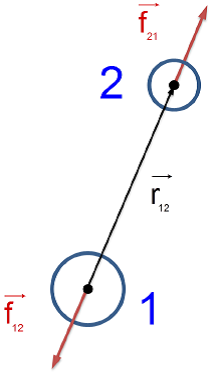
En notant ![]() , le vecteur reliant la position de la particule 2 par rapport à la particule 1, on a :
, le vecteur reliant la position de la particule 2 par rapport à la particule 1, on a :
Les forces sont alignées sur l’axe passant par les deux particules.
Remarques
- La mécanique newtonienne postule l’invariance des forces par changement de référentiel (galiléen ou non !).
Pour satisfaire à ce principe tout en préservant la RFD, il est nécessaire de considérer des accélérations propres à ces référentiels non galiléens pour modifier l’expression de l’accélération de la particule et préserver la notion de force associée aux interactions fondamentales.
- La relativité n’admet pas le principe de l’action et de la réaction.
4. Les lois de Newton
| Première loi | Il existe des référentiels, dits galiléens ou inertiels, dans lesquels une particule libre est soit au repos, soit animée d’un mouvement de translation rectiligne et uniforme (principe d’inertie).  |
| Deuxième loi | Dans un référentiel galiléen, l’accélération d’une particule de masse m soumise à une force F est donnée par la relation fondamentale de la dynamique :  |
| Troisième loi | Pour deux particules m1 et m2 soumises à leur seule interaction (principe de l’action et de la réaction) : avec : avec : |
5. Applications : forces gravitationnelles
Loi universelle de la gravitation
Autre fait d’arme d’Isaac Newton, il unifia les gravitations céleste et terrestre donnant naissance à l’interaction gravitationnelle.
Deux masses m1 et m2 s’attirent réciproquement avec une force proportionnelle au produit de leur masse et inversement proportionnelle au carré de leur distance r.
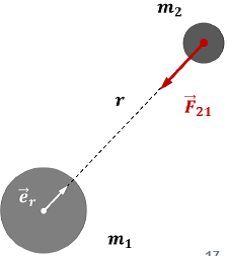
Est représentée ci-dessus, l’attraction de m1 sur m2.
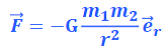
G = 6,67 10-11 N.m2.kg-2 est la constante gravitationnelle.
Cette force a pour direction l’axe passant par les centres de gravité des deux masses.
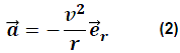
Considérons maintenant une planète de masse m tournant autour du soleil avec un mouvement approximativement circulaire. D’après la seconde loi de Newton :

Dans un mouvement circulaire :
La vitesse est reliée à la période T par le périmètre r de l’orbite circulaire : v = 2πr/T
Avec (1) et (2) :
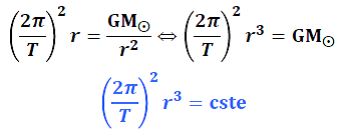
Troisième loi de Kepler
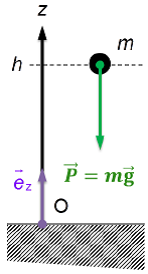
Revenons sur Terre :
Un corps de masse m à une hauteur h de la surface de la Terre est à une distance ![]() + h du centre de gravité de cette dernière.
+ h du centre de gravité de cette dernière.
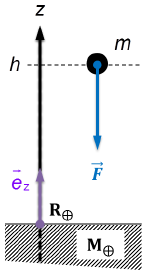
La force qu’exerce la Terre sur ce corps est donnée par :

On peut écrire la force sous la forme :
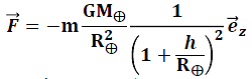
La norme de ce vecteur a une expression du type :
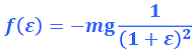
où ![]() et
et ![]() est très petit devant 1.
est très petit devant 1.
Au premier ordre de l’approximation (voir Rappels & complément de Mathématiques sur l’« approximation d’une fonction au voisinage d’un point ») : (1 + ax)α ≈ 1 + αax

Même à plusieurs kilomètres du sol ![]() est très petit devant 1.
est très petit devant 1.
A l’altitude de l’atmosphère terrestre on négligera le terme d’ordre 1 (-2ε).

g est appelée accélération gravitationnelle :
